
 产品:59
产品:59
 联系我们
联系我们

工博士机器人技术有限公司是一家集研发、生产、销售、技术服务于一体的专注于自动化、智能化设备生产和机器人系统集成应用的科技型企业,与ABB、库卡KUKA、发那科FANUC、安川YASKAWA、欧地希OTC、川崎Kawasaki、遨博AUBO、现代HYUNDAI、电装DENSO、欧姆龙OMRON、爱普生EPSON等机器人公司签订了战略合作关系。
公司业务范围:
◆机器人本体及配套产品销售、机器人应用技术培训服务;
◆机器人在焊接、切割、搬运、激光技术、机床上下料、钣金折弯、锻造等领域的系统集成应用;
◆机器人变位机、导轨、防护工作房、焊接工装夹具等系统周边设备的设计和生产。
地址:上海市嘉定区南翔镇众仁路399号B座20楼2007室(王工:18616566200)
----------------------------------------------------------------------------------------------------------
可以使用RoboDK通过两种方式给优傲(UR)机器人编优傲机器人程:
RoboDK是一款为工业机器人设计的仿真器与离线编程软件。RoboDK可以为UR机器人生成
可以在RoboDK仿真器中导入
UR机器人示教器的图形用户界面软件叫做PolyScope(如下图所示)。更多信息请参考UR
可以在RoboDK仿真器中输入机器人IP地址,并直接在真机上运行机器人程序。还可以通过FTP传输程序到机器人。优傲机器人
可以通过UR机器人示教器主屏幕上的
通过Ethernet将机器人连接至电脑(直接连接或者通过网络)。使用Ping可以测试网络连接是否成功。
机器人驱动器为离线编程(生成离线程序后传输至机器人并运行)提供新的可能。使用机器人驱动器,可以直接使用真机机器人运行仿真(在线编程)。更多信息请参考Robot Drivers部分。
当PC电脑与机器人建立连接后,可以在RoboDK直接在真机上运行机器人程序。
如果连接成功,将出现绿色的Ready信息。
在连接菜单中可以使用Get robot joints, Move Joints与Move Linear等指令移动机器人。
?
可以使用两种办法通过PC电脑,直接运行机器人程序:
当选中此选项后,每次双击仿真程序都将连接到机器人真机(或者右键单击后选择Run)。
这些操作在RoboDK API 优傲机器人部分也有介绍,还可以将机器人编程集成于其他应用中。RoboDK的应用编程接口(API)可用于Python,C#及其他编程语言环境。
?
在RoboDK安装自带Library中有一个用于实时监控UR机器人状态的宏。选择:
仿真器会自动更新机器人的位置,并随着机器人真机的运动添加机器人目标。可以实时查看机器人速度,加速度,马达电流等。
?
当机器人程序在RoboDK中调试成功后,可以生成
当机器人程序生成后,该程序将自动在文本编辑器中显示。可以通过Tools?Options?Program菜单修改这个操作。
可以通过FTP或者USB盘传输
以下内容介绍了在机器人上运行
?
?
机器人与电脑建立连接后,可以使用USB盘或者FTP将RoboDK生成的
我们建议使用系统的默认路径,或者在RoboDK的安装文件夹内安装FileZilla Client,这样RoboDK可以自动检测到该FTP程序:
使用FTP传输:

?
本部分内容可选,用于提高离线编程中的位置准确性。本部分介绍如何在RoboDK中输入针对每台UR机器人的运动参数,以便更准确地仿真与生成机器人程序。
UR机器人的运动参数根据每台机器优傲机器人人的出厂标定结果,包括6个长度参数,这些参数显示了实际机器人与仿真标准数据的差异。针对机器人的编程方式,这些数据有可能很重要。
每台UR机器人的准确运动参数可以通过以下几个步骤在RoboDK中设置:
完成以上步骤后,右键单击机器人并选择Save as .robot,这些参数将与机器人文件一起保存。
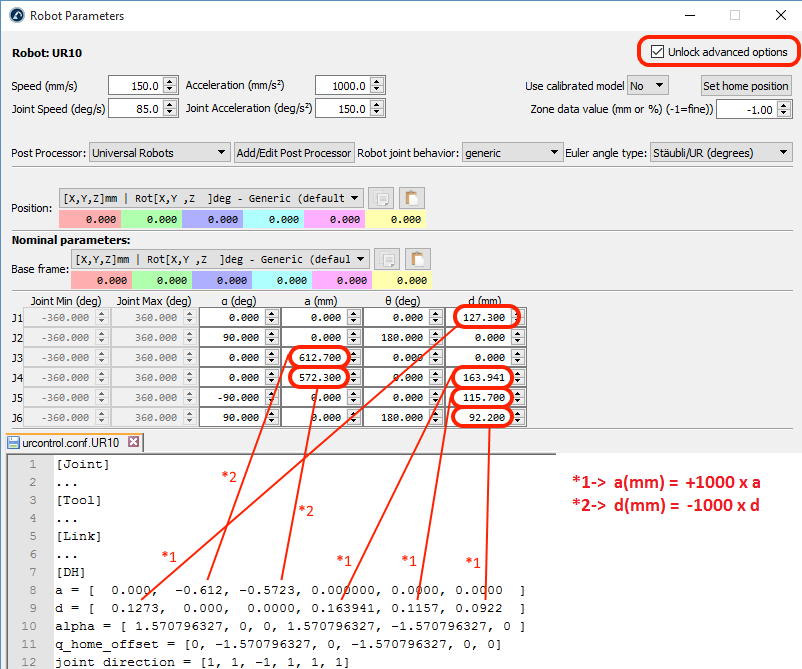
每台UR机器人的运动参数都有差别,这是由于出厂前针对每台机器人的标定,对机器人实际物理参数做出了补偿。其他***例如库卡(KUKA),ABB,安川(Motoman)与发那科(Fanuc)等提供Absolute Accuracy选项,用户可付费购买厂家标定服务。一般来说,Absolute Accuracy标定服务将补偿40个或更多标定参数。
文章来源:https://robodk.com/doc/cn/Robots-Universal-Robots.html
更多咨询:优傲机器人

